TLoRA: Tri-Matrix Low-Rank Adaptation of Large Language Models
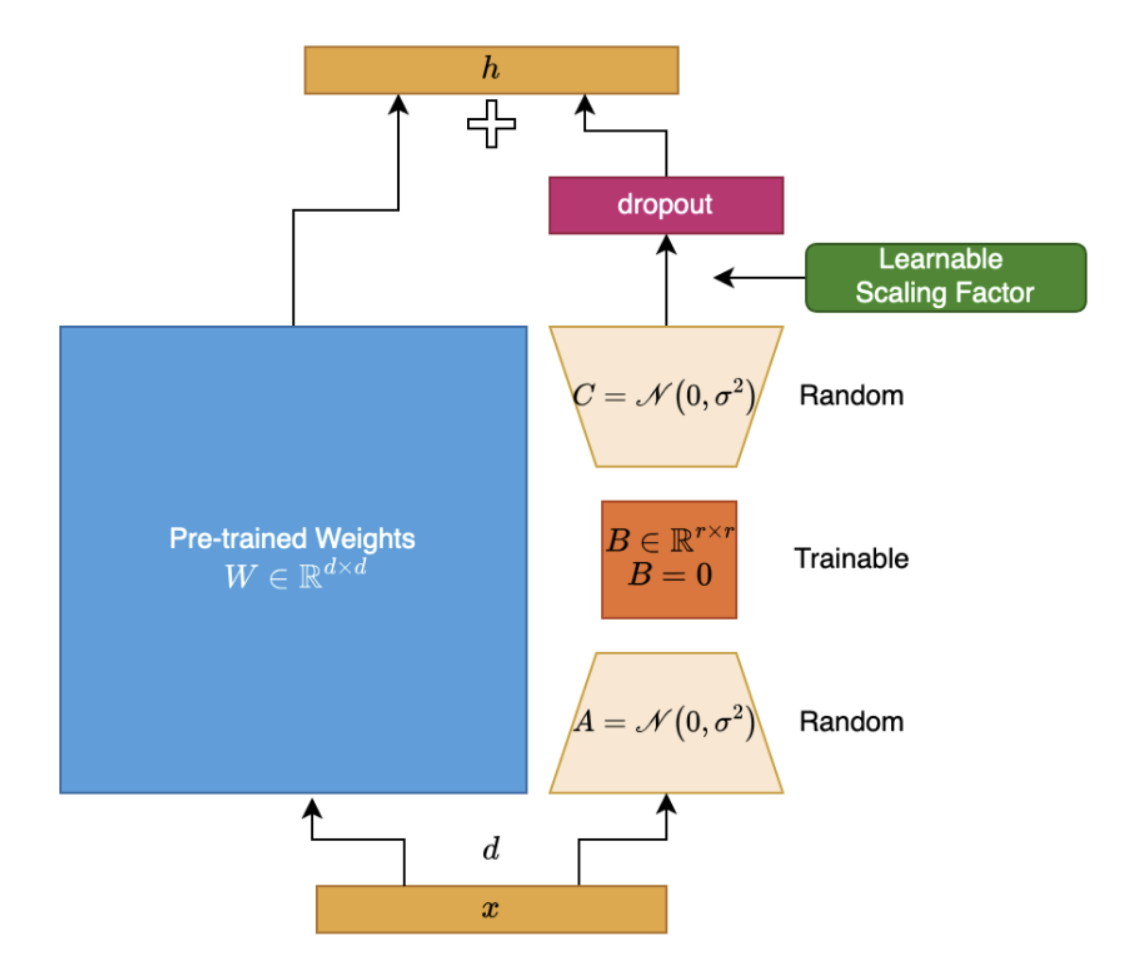
We propose TLoRA, a novel tri-matrix low-rank adaptation method that decomposes weight updates into three matrices: two fixed random matrices and one trainable matrix, combined with a learnable, layer-wise scaling factor. This tri-matrix design enables TLoRA to achieve highly efficient parameter adaptation while introducing minimal additional computational overhead.